- Development of multi-object detection algorithm based on CNN
- SNN based multi object detection algorithm optimization
- Algorithm lightweighting and optimization for autonomous driving for vehicles
- Algorithm lightweighting and accuracy improvement for SNN implantation
- Improving DNN to SNN Mapping Algorithm Performance by Considering Inference in SNN
- SNN error rate compared to DNN achieved < 5%
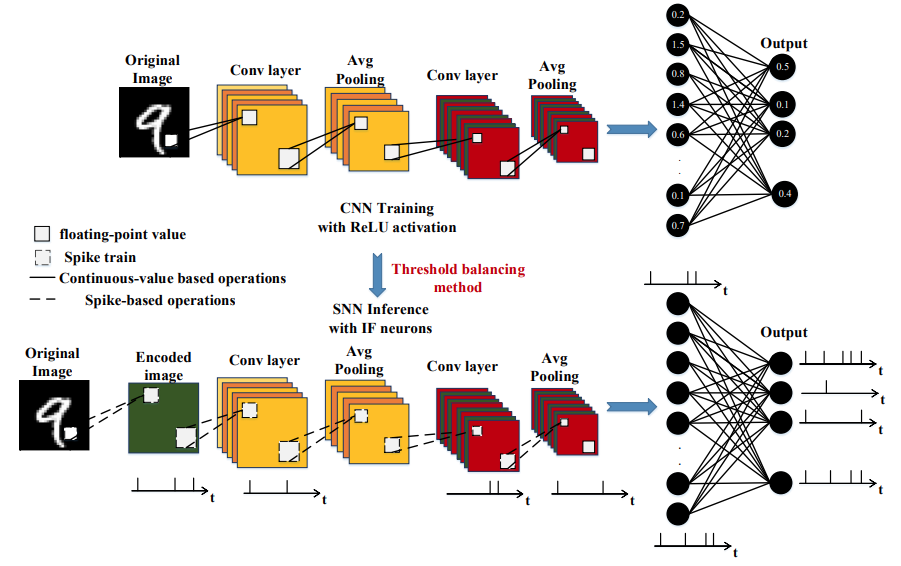
Fig 1. The CNN-SNN conversion scheme.
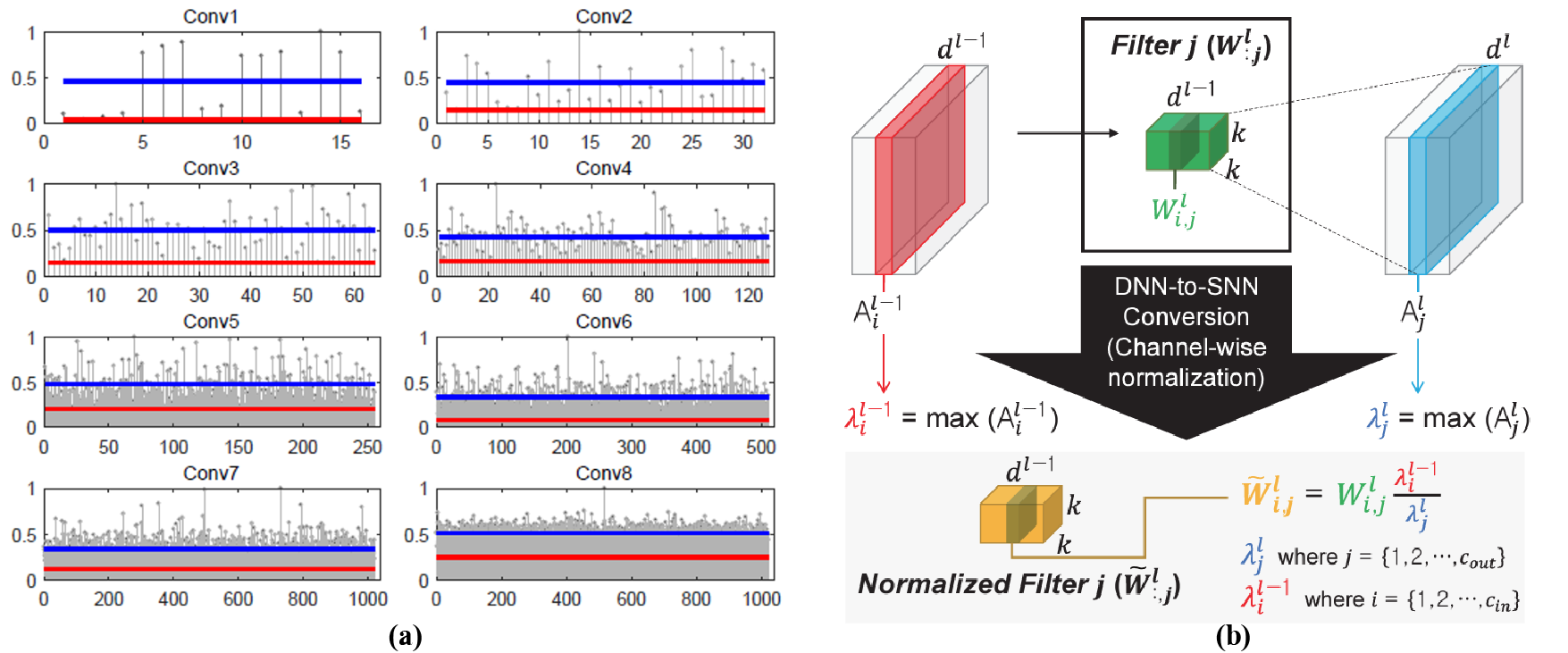
Fig 2. (a) The image shows the normalized maximum activation values obtained through channel-specific normalization in the eight convolutional layers of the TinyYOLO model. The blue and red lines represent the mean and minimum of the normalized activation values, respectively. (b) The proposed channel-by-channel normalization is a normalization method that targets $A^l_j$, which is all activation matrices (i.e., feature maps) of the $l$-th layer.
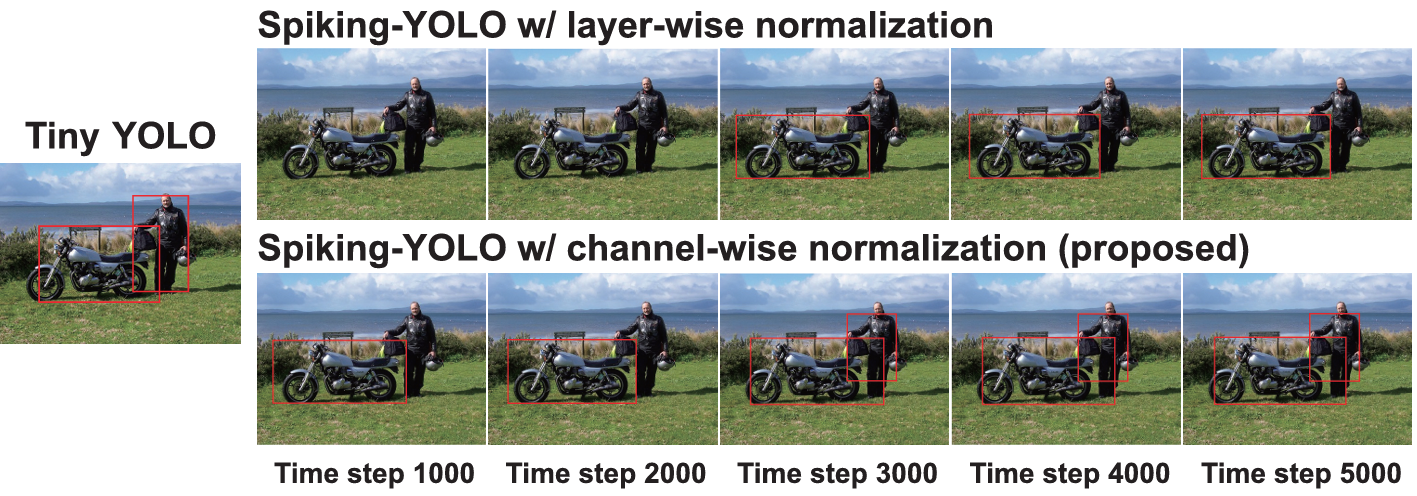
Fig 3. Object detection results (TinyYOLO vs Spiking-YOLO with layer-norm vs Spiking-YOLO with channel-norm).
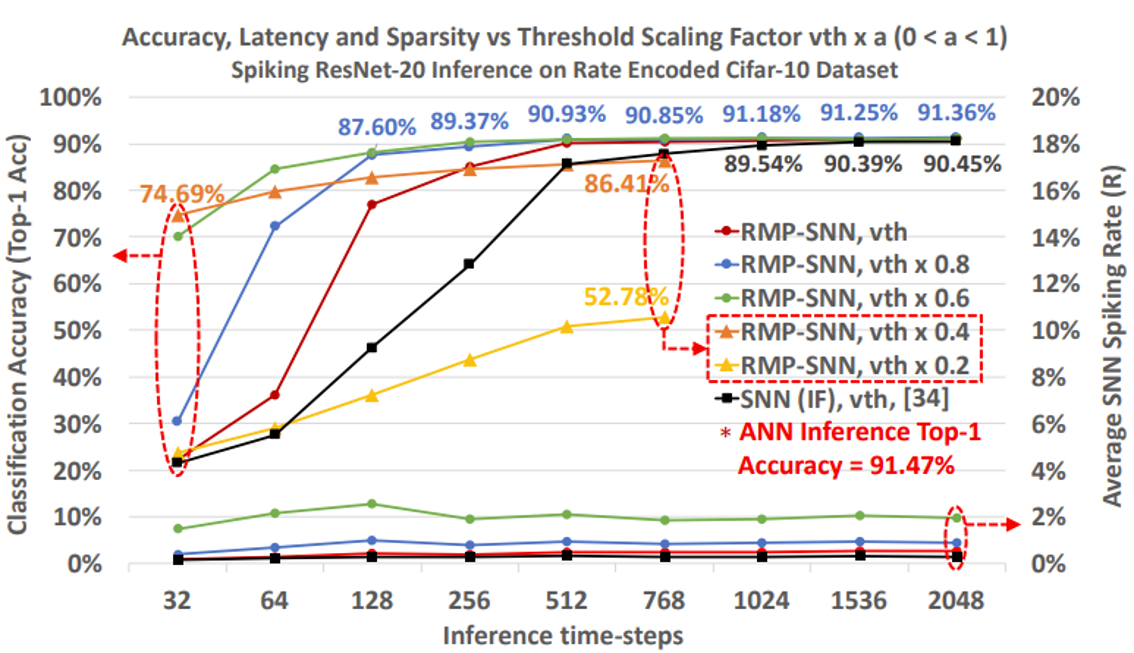
Fig 4. Accuracy latency trade-off.
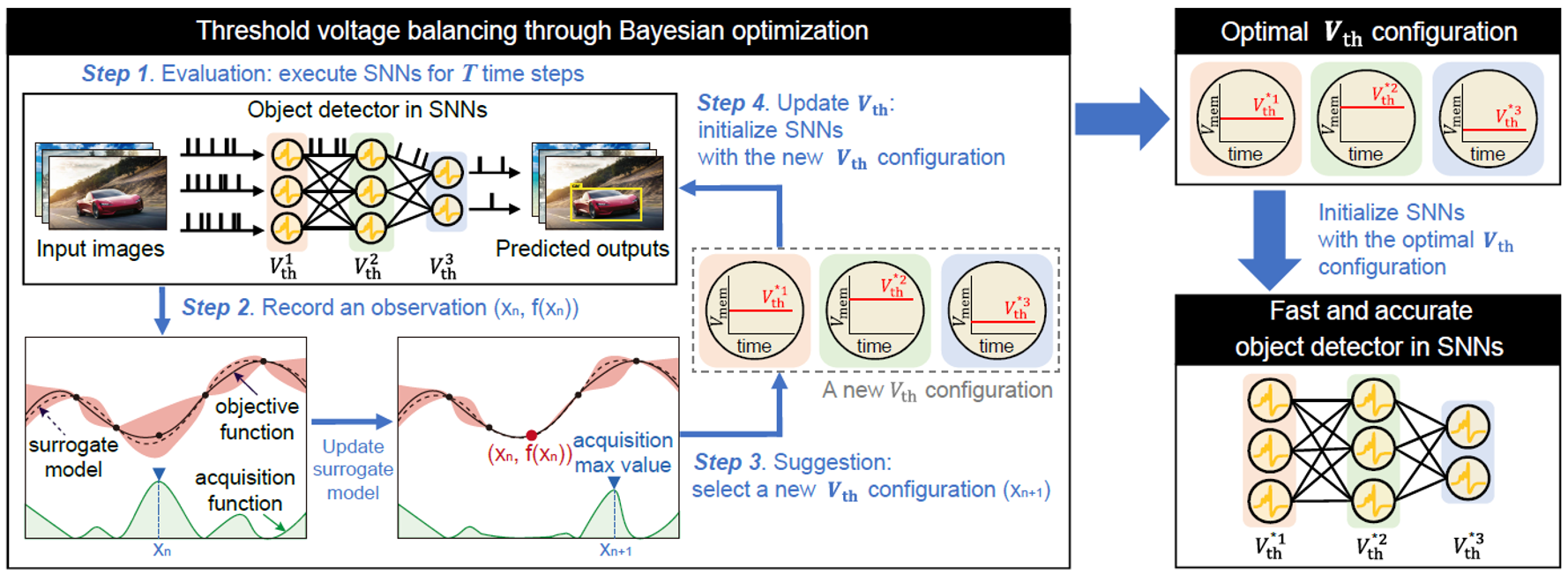
Fig 5. Bayesian threshold optimization overview.
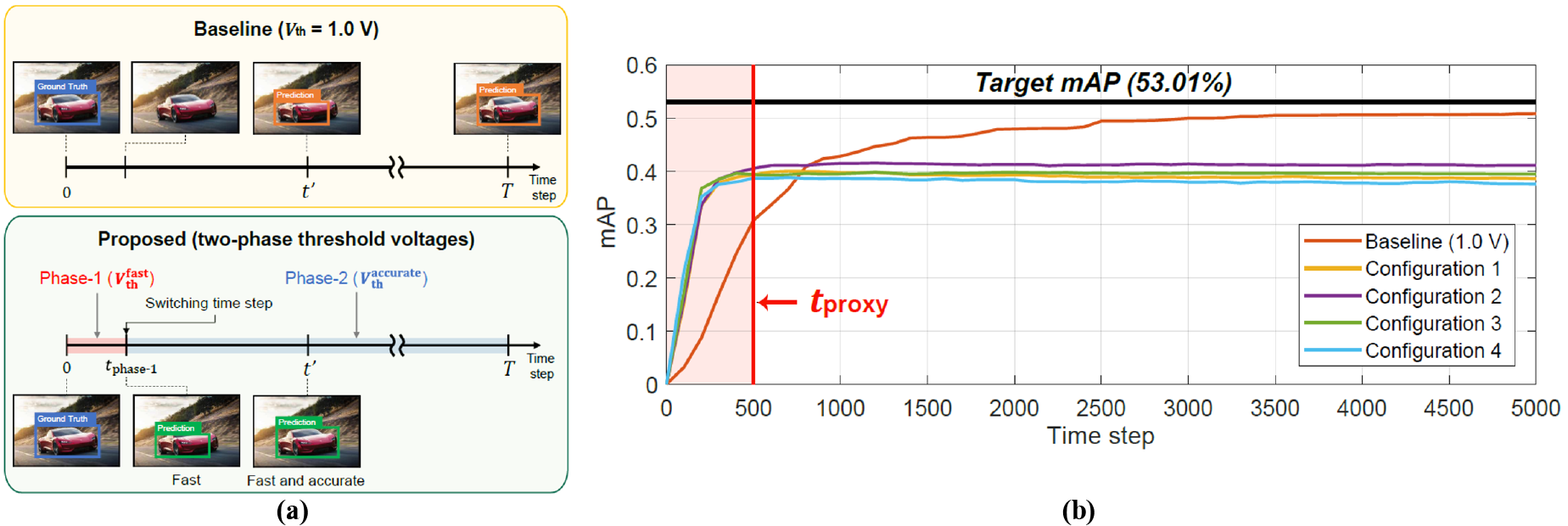
Fig 6. (a) Two-phase threshold voltages for fast and accurate object detection in SNNs. (b) Object detection accuracy (mAP %) curve of phase-1 threshold voltages as time step increases.
- HW/SW Integration
- Implementation and optimization of the proposed algorithm on the chip using the provided API
- Demonstration of SNN-based multi-object recognition algorithm on digital emulator, implementation of core functions such as ReLU and Pooling, implementation of parallel data interface